我之前写过一个关于SVM中核函数的基本原理,讲述了核函数的本质是利用高维映射来解决线性不可分的情况。但是具体怎么映射,以及核函数为什么写成两个向量内积的形式还存在一些疑问,这篇文章对这些知识点做一些总结。
感知机的对偶形式
对偶,简单地说,就是从一个不同的角度去解答相似问题,但是问题的解是相通的。或者说原始问题比较难求解,我们去求解另外一个问题,希望通过更简单的方法得到原始问题的解。
《统计学习方法》(李航)在感知机的2.3.3小节中描述了感知机求解的对偶形式:
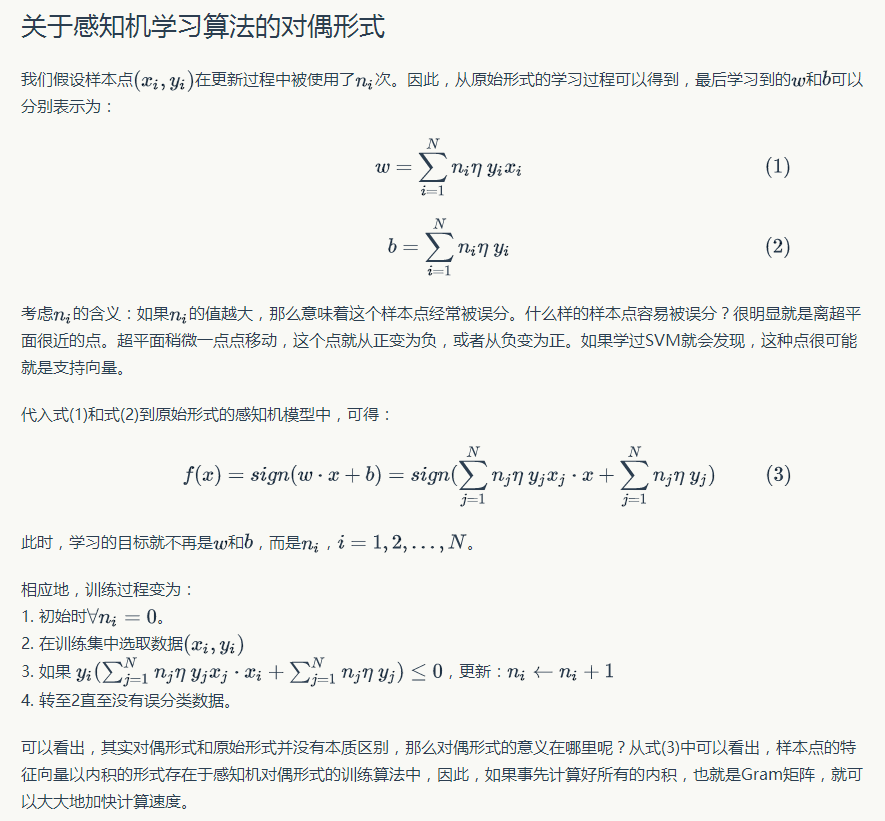
对偶形式的基本想法是,将\(w\)和\(b\)表示为实例\(x_{i}\)和标记\(y_i\)的线性组合形式,通过求解其系数而求得\(w\)和\(b\)。
对于感知机来说,简单来说,就是用每个样例去的线性加权和去表示要训练得到的\(w\)和\(b\),最后一次加上去就好了,而我们要学习的参数就从\(w\)和\(b\)转换为了样本的加权系数。这里我就不想再敲一遍公式了,感兴趣的可以看原书的推导过程,这里我贴一张网上的图片:
SVM的对偶形式
和感知机类似,SVM的优化求解也有对偶形式。下面通过SVM求解和求对偶求解的推导来说明。
SVM基本形式求解
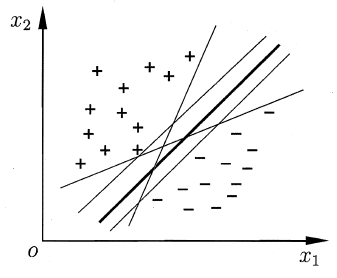
给定一个二分类问题的训练样本集\(D={(\boldsymbol{x}_1,y_1),(\boldsymbol{x}_2,y_2),…,(\boldsymbol{x}_m,y_m)},y_i\in {-1, +1}\),我们的目标是找到一条分界线/超平面来将两类区分开,如下图:
在样本空间中,超平面可以通过以下线性方程来描述:
其中,\(\boldsymbol{w}=(w_1,w_2,…,w_d)\)为法向量,决定了超平面的方向;\(b\)为位移项,决定了超平面与原点的距离。如果一个超平面能够将训练样本正确分类,则我们希望这个超平面具有的性质是,对于\((\boldsymbol{x}_i,y_i)\in D\),有:
这个式子也是我们在得到超平面之后预测一个新样本的判决条件。
显然,上图中5个超平面都满足要求。但是,哪一个是最好的呢?直观上看,应该去找位于两类训练样本“正中间”的超平面,即上图中最粗的分界线。因为这条线能够在最大程度上容忍两类的数据波动和噪声。因此,为了能够得到“正中间”位置的超平面,我们将上述条件变得更加严格:
显然,条件严格后,靠近样本边缘的一些超平面可能会不符合要求,最后会剩下比较靠中间的几个超平面。那么,如何选出最“正中间”的那个超平面呢?我们可以给一个具体的量化目标:让超平面与最近的样本的距离最大。
如下图所示,距离超平面最近的这几个样本点可以使得公式 (1) 的等号成立,它们被称为“支持向量”(Support Vector)。
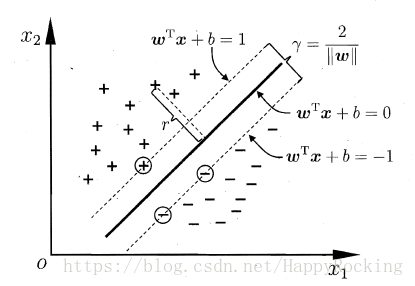
样本空间中任意点\(\boldsymbol{x}\)到超平面的距离的计算公式为:
因此,两类的支持向量到超平面的距离之和为\(\frac{2}{\boldsymbol{w}}\),这就是“间隔”(margin)
如果想找到具有“最大间隔”(maximum margin)的超平面,那么需要最小化\(||\boldsymbol{w}||^2\)。因此,最后需要求解的问题为:
这就是支持向量机(Support Vector Machine,SVM)的基本型。
SVM对偶形式求解
我们希望求解问题(2)来得到“正中间”的分界超平面:
其中,\(\boldsymbol w\)和\(b\)正式模型的最优解的参数。问题(2)本身是一个凸二次规划问题,可以直接使用现成的优化计算包求解。但我们有更高效的办法,即转为求解其对偶问题,转换过程如下。(下面的推导我自己也看的有点蒙,看不懂略过吧)
根据拉格朗日乘子法,对原问题的每条约束添加拉格朗日乘子\(\alpha \ge0\),则该问题的拉格朗日函数可写为:
其中,\(\boldsymbol\alpha=(\alpha_1,\alpha_2,…,\alpha_m)\)。可以发现:
所以\(L(\boldsymbol w,b,\boldsymbol\alpha)\le \frac1 2 ||\boldsymbol w||^T\),即拉格朗日函数是原问题的一个下界。我们要想找到最接近原问题最优值的一个下界,就需要求出下界的最大值。
根据拉格朗日对偶性,原始问题的对偶问题是最大化最小问题:
首先,求\(\min_{\boldsymbol{w},b}L(\boldsymbol w,b,\boldsymbol\alpha)\),消除掉\(\boldsymbol w, b\)偏导为0,可推出:
将公式(4)和(5)带入到拉格朗日函数(3),得到:
因此,问题(2)的对偶问题是:
解出\(\boldsymbol \alpha\)后,便可以求出\(\boldsymbol w\)和\(b\),即可得到模型:
需要注意的是,问题(2)有不等式约束,因此对偶问题需要满足KKT条件:
因此,对于训练样本\((\boldsymbol x_i,y_i)\),总有\(\alpha_i=0\)或者\(y_if(\boldsymbol x_i)=1\)。若\(\alpha_i=0\)则该样本不会对\(f(\boldsymbol x)\)的值有任何影响;若\(\alpha_i>0\),则必有\(y_if(\boldsymbol x_i)=1\),所对应的样本点位于最大间隔边界上,是一个支持向量。这显示出支持向量的一个重要性质:训练完成后,大部分的训练样本都不需要保留,最终模型仅与支持向量有关。
简单总结:
和感知机的对偶求解类似,SVM也是通过样本的线性加权和来求解\(\boldsymbol w\)和\(b\),进而得到SVM的最优解。我们注意到,在利用对偶求解的过程中,是要利用两个样本的内积来求解的,这就为核函数的使用埋下了伏笔。
SVM核函数
上一小节讲的是线性可分的情况下,SVM的超平面求解。如果样本在特征空间内线性不可分,则需要利用核函数将其映射到高维空间中,让其在高维空间中线性可分。根据SVM基础形式的求解,我们可能会想到下面的方式:
这里的\(\phi_i())就是从输入的特征空间到某个更高维的特征空间的映射,这就意味着建议了非线性的学习器分为两步:
- 首先使用一个非线性映射将数据变换到另一个特征空间
- 在高维的特征空间中使用线性学习器分类
这种基本型的求解是非常难的,因为这个映射函数是非常难以寻找和求解的!(据说NP难),而了解了SVM的对偶形式给了另一种求解思路:
注意到,我们在求解的时候需要计算\(\boldsymbol \phi_i(\boldsymbol x_i) \cdot \boldsymbol \phi(\boldsymbol x)\),也就是映射后的两个样本的高维特征的内积形式,如果有一种方法可以在特征空间中直接计算这个东西,是不是就很方便了?对的,核函数就是做这个的:
上述的思想就是SVM核函数的核心思想,以前一直没太明白核函数为啥是映射两个样本的内积,直到看到对偶形式的求解才明白。有了这个概念,再去阅读核函数的原理就恍然大悟了。下面以多项式核函数和高斯核来具体看看核函数是如何映射的。
多项式核函数
对于一个多项式核函数
假设每个向量的维度为2,也就是: \(\boldsymbol x=(x_1, x_2), \boldsymbol z=(z_1,z_2)\),则有:
又因为特征映射为:
所以可得:
可以看出,将\(\boldsymbol R^2\)映射到了\(\boldsymbol R^3\)
高斯核
现在分析高斯核:
和上面一样,假设每个向量有两个维度,则高斯核展开为:
根据泰勒展开式:
所以可得核函数的展开为:
因此,高斯核函数是将变量从现有的特征空间映射到无限维的特征空间中。